Remonter des objets n’est plus la priorité de l’archéologie sous-marine, au contraire il s’agit aujourd’hui d’étudier le contexte, de modéliser un site, de réaliser une image virtuelle, un peu comme le font les enquêteurs sur une scène de crime. Par 90 mètres, à cause du manque de lumière et de la pression, il est très difficile de travailler scientifiquement. Aussi, Michel L’Hour a considéré que la Lune était l’occasion idéale d’expérimenter des méthodes « profondes » innovantes et d’en faire le laboratoire de la fouille archéologique sous-marine de demain. Dans laquelle des robots feront le travail des hommes, avec la même dextérité mais sans danger… Pour mener à bien ce chantier avant-gardiste, Michel L'Hour rassemble des partenaires et c'est sous le nom de « Corsaire Concept » que le projet est en train de prendre forme...
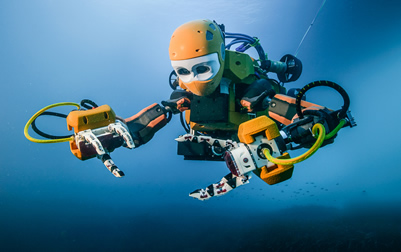
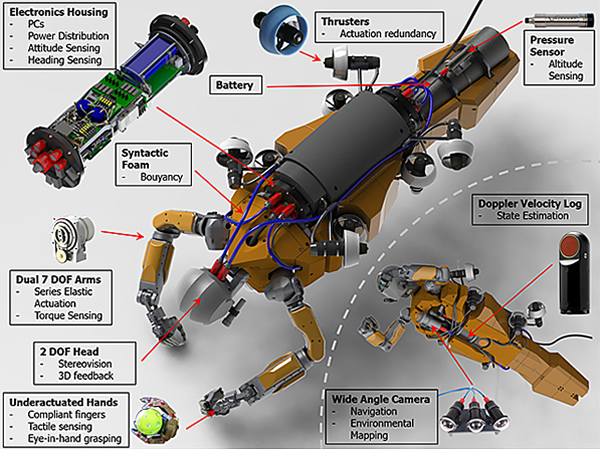
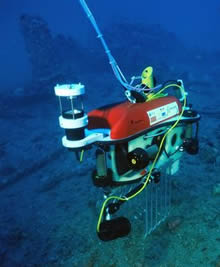
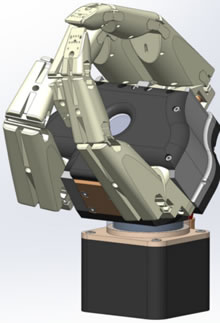
Sous la houlette de Vincent Creuze, le laboratoire d'informatique, de robotique et de microélectronique de Montpellier (LIRMM) a développé un prototype de robot archéologue permettant d'atteindre des lieux inaccessibles. Le premier robot Speedy a permis de tester un système de vision omnidirectionnelle, une main anthropomorphe à trois doigts qui épouse la forme des objets saisis.Un autre système à griffes auquel les archéologues ne croyaient pas d'emblée a pu être expérimenté, une sorte de grosse pince permettant d'attraper sans danger certains objets de la Lune... Le prochain robot sera plus gros pour mieux résister aux courants, les moteurs seront placés différemment, la main sera équipée d'une interface haptique qui permettra au pilote de sentir la pression exercée sur l'objet et pourquoi pas déceller au toucher les concrétions et d'éventuelles fissures...
Robotique haptique…
Pour Oussama Khatib, professeur en science informatique et responsable du Laboratoire de robotique à Stanford, plus que la mobilité, c’est la manipulation qui demeure le principal problème de la robotique aujourd’hui. La manipulation humaine est bien différente de celle des robots et si l’on veut progresser sur cette question, les robots doivent mieux apprendre des humains. Le problème, estime le professeur, c’est que la solution de la programmation risque de ne pas réussir en dehors d’environnements très industriels et très standardisés. Les robots ont besoin de plus de compétences et de capteurs d’exécution. Pour résoudre ce défi, le chercheur propose de faire intervenir l’homme. Les humains doivent pouvoir intervenir à distance, piloter le robot à distance, comme un avatar. L’autonomie totale semble trop inatteignable : alors, pourquoi ne pas tricher un peu ou se montrer pragmatique, en montrant au robot comment faire et en lui permettant ainsi d’apprendre plus rapidement. Une poignée haptique permet de manipuler la pince du robot virtuel à distance et de ramasser des objets sur les fonds marins. Les outils de médiation haptique permettent de rendre la manipulation robotique plus complexe. Demain, ces interfaces haptiques pourront même être connectées directement sur nos cerveaux pour permettre aux robots de se déplacer même quand celui qui les pilote ne peut lui, pas se déplacer librement. Cela permet aussi aux robots d’apprendre de la manipulation humaine le but étant de documenter une base de données de manipulations qui leurs permettront peut-être demain de reproduire nos gestes avec des sensations du toucher trés précises...